پروژه کنترل هوشمند سرعت موتور DC با استفاده از ANFIS
پروژه کنترل هوشمند سرعت موتور DC با استفاده از ANFIS
چکیده :
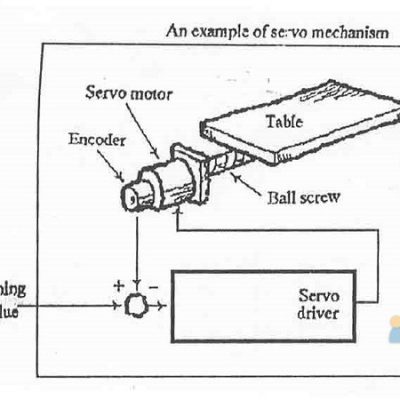
مزیت اصلی استفاده از موتور DC در جهان امروز قابلیت کنترل راحت سرعت و زاویه موتور آن است. خیلی از سیستم های کنترلی طراحی شده اند تا با کاهش اُورشورت ها و زمان نشست عملکرد بهتری را برای موتور ایجاد کنند. این پایان نامه به کنترل سرعت موتور DC با استفاده از سیستم کنترل فازی –عصبی تطبیقی ( Adaptive Neuro- Fuzzy Inference System ) می پردازد. این کنترل کننده بر اساس کنترل فازی – عصبی تطبیقی پایه گذاری شده است و هدف کلی آن کاهش خطای حالت ماندگار ( stady state error ) و زمان خیز ( rise time ) می باشد.
یک کنترل کننده PID در این پایان نامه طراحی می شود تا براساس اطلاعات یادگرفته شده از سیستم توسط ANFIS سرعت موتور را کنترل کند. ما این سیستم کنترل را با نرم افزار MATLAB و با استفاده از قسمت Simulink آن شبیه سازی می کنیم.
عملکرد دو نوع سیستم کنترل PID و ANFIS در گشتاورهای بار مختلف در این پایان نامه ارزیابی می شود. اجرای عملی این سیستم در آزمایشگاه موتور DC با موفقیت بوسیله رابط Dspace انجام شده است.
در این پایان نامه نتایج حاصل از شبیه سازی کامپیوتری با نتایج عملی مقایسه می شوند.
فهرست مطالب پروژه کنترل هوشمند سرعت موتور DC با استفاده از ANFIS :
فصل اول : مقدمه
مقدمه ای بر simulink و dSPACE
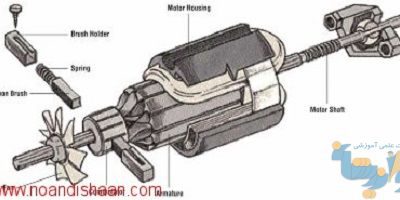
مدلسازی موتور DC
مشخصات الکتریکی
طراحی موتور DC در سیمولینک
کنترل آبشاری موتور DC
فصل دوم : سیستم های استنتاج فازی – عصبی تطبیقی
سیستم استنتاج فازی
سیستم استنتاج فازی از نوع سوگنو
ساختار ANFIS 22
الگوریتم یادگیری هیبریدی
نکات
محدودیت های ANFIS
یادگیری ANFIS
ANFIS Editor چهار قسمت اصلی دارد
فصل سوم : طراحی کنترل کننده
طراحی کنترل کننده PID
مشخصات کنترل کننده PID
تنظیم کردن PID
کنترل کننده سرعت PID
کنترل کننده جریان PID
طراحی کنترل کننده ANFIS
فصل چهارم : شبیه سازی
شبیه سازی PID
شبیه سازی ANFIS
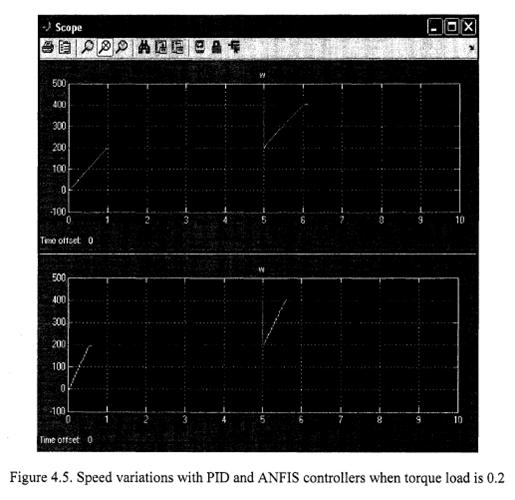
مقایسه کنترل کننده های PID و ANFIS در گشتاور بارهای مختلف
وقتی گشتاور بار N-m 1/0 باشد
وقتی گشتاور بار N-m 2/0باشد
فصل پنجم : اجرای سیستم در زمان واقعی ( real- time)
مراحل ساختن مدل زمان واقعی
نتایج اجرا در زمان واقعی کنترلر ANFIS
مدل سیمولینک در زمان واقعی کنترل کننده PID
نتایج تحلیل زمان واقعی کنترل کننده PID
نتایج شبیه سازی زمان واقعی برای بارهای آشفته (پارازیتی)
فصل ششم : نتیجه گیری
کارهای بعدی
پارامترهای موتور DC
مقدمه ای بر dsPACE
ویژگی های اصلی dsPACE عبارتند از
برد کنترلی DS1104R8D:
نرم افزار dsPACE:
بورد درایو الکتریکی
منابع
فرمت فایل : word
تعداد صفحات : ۷۵ صفحه
نام فایل: پروژه کنترل هوشمند سرعت موتور DC با استفاده از ANFIS
دانلود فایل: لینک مستقیم
پسورد: www.noandishaan.com
مطالب زیر را حتما بخوانید:






قوانین ارسال دیدگاه در سایت
- چنانچه دارای سوال فنی درباره محصول خریداری شده هستید، لطفاً از بخش حساب کاربری، تیکت ارسال کنید.
- چنانچه دیدگاهی توهین آمیز باشد و متوجه اشخاص مدیر، نویسندگان و سایر کاربران باشد تایید نخواهد شد.
- چنانچه دیدگاه شما جنبه ی تبلیغاتی داشته باشد تایید نخواهد شد.
- چنانچه در دیدگاه خود از شماره تماس، ایمیل و آیدی تلگرام استفاده کرده باشید تایید نخواهد شد.







سلام خسته نباشید. خیلی ممنون بابت این مقاله مفید و عالی.
موفق باشید